Pelajari cara membuat sistem sensor parkir mobil menggunakan ESP32, sensor HC-SR04, dan buzzer. Proyek ini mendeteksi jarak dan memberikan suara peringatan dengan kecepatan yang berubah sesuai dengan jarak.
Parkir mundur bisa jadi sulit tanpa bantuan sensor. Untungnya, kamu bisa membuat sendiri sensor parkir mobil menggunakan ESP32, sensor ultrasonik HC-SR04, dan buzzer piezoelektrik. Sistem ini akan memberikan peringatan suara yang semakin cepat saat kendaraan mendekati objek di belakangnya.
Proyek ini sangat cocok untuk pemula yang ingin belajar menggabungkan sensor input, logika pengukuran, dan output buzzer di ESP32.
Komponen yang Dibutuhkan:
- 1x ESP32
- 1x Sensor Ultrasonik HC-SR04
- 1x Buzzer
- Breadboard + Kabel jumper
Skema Pin ESP32 yang Digunakan:
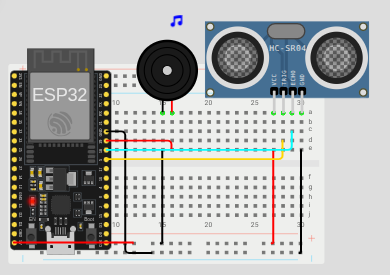
| Komponen | ESP32 Pin |
|---|---|
| Trig Pin | GPIO 5 |
| Echo Pin | GPIO 18 |
| Buzzer | GPIO 19 |
Catatan: GPIO bisa disesuaikan asal tidak konflik dengan fungsi ESP32 lainnya.
Kode Program ESP32 Parking Sensor (Arduino IDE):
#define trigPin 5
#define echoPin 18
#define buzzerPin 19
int maximumRange = 50; // dalam cm
int minimumRange = 0;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzerPin, OUTPUT);
Serial.begin(115200);
}
void loop() {
int jarak = bacaJarak(maximumRange, minimumRange);
Serial.print("Jarak: ");
Serial.print(jarak);
Serial.println(" cm");
bunyikanBuzzer(jarak * 10); // Semakin dekat, bunyi semakin cepat
}
// Fungsi untuk menghitung jarak
int bacaJarak(int maxrange, int minrange) {
long durasi, jarak;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
durasi = pulseIn(echoPin, HIGH);
jarak = durasi * 0.034 / 2;
delay(50);
if (jarak >= maxrange || jarak <= minrange) {
return 0;
}
return jarak;
}
// Fungsi untuk membunyikan buzzer
void bunyikanBuzzer(int jeda) {
if (jeda > 0) {
tone(buzzerPin, 1000); // Frekuensi 1 kHz
delay(jeda);
noTone(buzzerPin);
delay(jeda);
} else {
noTone(buzzerPin); // Tidak ada objek, tidak bunyi
}
}
Penjelasan Kode:
bacaJarak(): menghitung jarak menggunakan HC-SR04. Rumus(durasi * 0.034 / 2)mengonversi waktu pantulan ke dalam centimeter.bunyikanBuzzer(): bunyikan buzzer dengan delay yang berubah sesuai jarak. Objek semakin dekat → delay semakin kecil → buzzer berbunyi semakin cepat.- Range 0–50 cm: bisa disesuaikan dengan kebutuhan parkir.
Ide Pengembangan Proyek:
- Tambahkan OLED/Display LCD untuk menampilkan jarak real-time
- Integrasi ESP32 + WiFi untuk mengirim data ke smartphone (Thingspeak/Blynk)
- Tambahkan LED RGB sebagai indikator visual tambahan
- Kembangkan jadi robot parkir otomatis
Kesimpulan:
Proyek Parking Car Sensor dengan ESP32 adalah salah satu implementasi sederhana namun sangat berguna dari teknologi sensor ultrasonik. Dengan bantuan buzzer, kamu bisa menciptakan sistem parkir pintar yang berbunyi secara otomatis sesuai jarak.
Ini merupakan langkah awal yang baik sebelum masuk ke sistem parkir berbasis kamera atau IoT yang lebih kompleks.
Tags:
#ESP32 #HC-SR04 #SensorParkir #Ultrasonik #ArduinoIDE #ProyekDIY #IoT #Buzzer #SensorJarak